
迈步机器人联合多家高校、三甲医院发表SCI顶级期刊论文,产品有效性获充分验证
迈步机器人近三年已于国际TOP期刊发表论文近20篇,近日,再次与清华大学、武汉大学、南京医科大学第一附属医院、深圳市第二人民医院、山东大学齐鲁医院等多家知名高校、医院联合在SCI TOP期刊发表两篇高水平学术论文,充分验证了迈步机器人团队研发的下肢外骨骼机器人H系列产品的有效性。
迈步机器人与清华大学具有丰富的前期研究合作基础,包括:共同从事医疗机器人研究、发表学术论文,共同开展国家自然科学基金项目等。此次密切合作,以迈步机器人产品康复下肢外骨骼机器人(BEAR-H)为依托,以南京医科大学第一附属医院、深圳市第二人民医院为试验基地,通过产学研用的合作方式对新型智能康复下肢外骨骼机器人(BEAR-H)的有效性进行了验证,在SCI期刊IEEE ROBOTICS & AUTOMATION MAGAZINE发表题为BEAR H: An Intelligent Bilateral Exoskeletal Assistive Robot for Smart Rehabilitation的学术文章。
IEEE ROBOTICS & AUTOMATION MAGAZINE期刊是机器人学、自动化与控制系统行业的权威刊物,JCR一区。本篇论文作者包括清华大学李翔教授、南京医科大学第一附属医院励建安院士、深圳大学第一附属医院龙建军主任、迈步机器人CEO陈功和CTO叶晶。
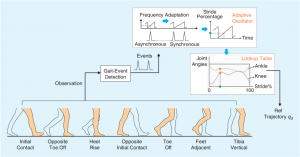
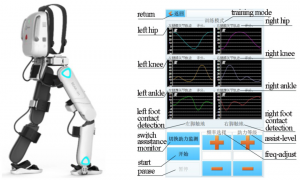
文章介绍了由迈步机器人研发的新型智能康复下肢外骨骼机器人(BEAR-H),其主要创新之处在于采用柔性驱动器及自适应阻抗控制,集成步态识别、个性化轨迹生成和同步云计算诊断等多种智能功能。BEAR-H已开展30例患者临床试验,通过评估训练效果并从研究中得到验证,患者在使用该款下肢康复外骨骼机器人训练后下肢运动功能得到明显改善。
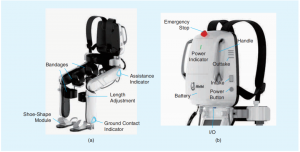
与其他康复机器人相比,BEAR-H具有以下特点:
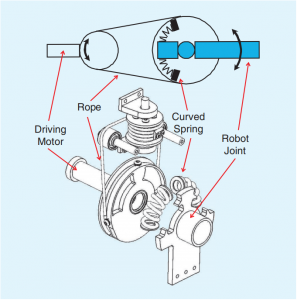
(1)相比传统刚性驱动器,柔性驱动器在力控制、阻抗控制等人机交互应用中具有极高的稳定性和力反馈精度,不需增加额外的力/力矩传感器即可得到力反馈,最大限度的保证使用安全。
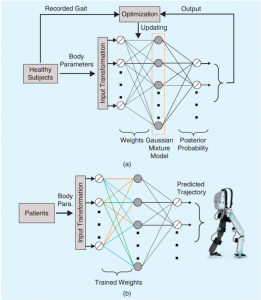
(2)提出个性化轨迹生成方案,通过机器学习方式建立患者身体参数到下肢行走轨迹的深度网络,定制行走轨迹为患者提供更为贴合的个性化助力方案在不确定的动态情况下调节相互作用力矩和关节角度之间的关系,阻抗模型的实现也提供了一定程度的自由移动空间,因此适合根据需要进行协助的康复范式。
(3)建立云端管理平台,允许医生和家属监控康复进展,访问带有历史数据的个性化文件,快速了解整个训练过程。

励建安教授团队
南京医科大学第一附属医院励建安教授(中国康复医学第一人)是美国医学科学院国际院士,现任亚洲与大洋洲康复医学会副主席。励教授带领的团队曾开展国内步态分析的临床应用。在健康中国的大局下,近年来还积极参与推动体医融合、康养融合、大数据-人工智能与主动健康、康复机器人和智能辅具、肿瘤康复、心肺康复等。
李翔教授团队
清华大学自动化系李翔教授团队依托于国家CIMS工程技术研究中心,长期从事面向复杂系统控制与优化的进化计算、深度神经网络、多智能体与网络控制等各智能方法研究,在智能医疗机器人、深海特种机器人、重载列车协同控制、智能制造工厂等多种大型装备与系统领域承担国家重点专项、国家自然科学基金重点项目,获国家科技进步二等奖等奖励。
迈步机器人团队
迈步机器人团队是由陈功、叶晶等多位海归博士和资深机器人行业从业者组成,具有深厚的技术积累和国际化的视野,在机器人领域拥有世界顶尖的技术水平,坚持自主创新,具有强大的研发能力和创新理念。围绕其核心技术–基于柔性驱动器的机器人交互技术,研发了包括下肢康复外骨骼机器人在内的数款医疗康复机器人产品,通过精确稳定的力控制实现了患者-机器人协作的主动训练模式,极大提升康复训练的效果。自公司成立以来,共完成五轮融资,融资额逾亿元,获得了资本市场的强力支持,引入了包括联想创投、分享投资、威高集团、四环医药等知名投资机构。
此外,迈步机器人与武汉大学通力合作,在山东大学齐鲁医院、南京医科大学第一附属医院等多家机构开展了“采用个性化步态的康复机器人对偏瘫患者步态训练影响”的研究,在SCI期刊Frontiers in Neurorobotics发表题为Effects of Individualized Gait Rehabilitation Robotics for Gait Training on Hemiplegic Patients: Before-After Study in the Same Person的学术文章。
Frontiers in Neurorobotics期刊重点关注机器人学、人工智能、神经科学行业,JCR二区。武汉大学郭朝教授为第一作者,迈步机器人CEO陈功和CTO叶晶为主要贡献者。
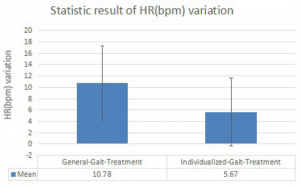
下肢外骨骼机器人正广泛用于中风患者的步态康复训练。然而,目前大多数康复机器人都是由预定的步态轨迹进行训练,这往往与特定患者的实际步态轨迹不同。因此,文章旨在探讨根据患者身体参数生成的个性化步态对使用下肢外骨骼机器人的偏瘫患者步态康复训练过程中能量消耗情况的影响,从而验证个性化步态轨迹对提升康复训练效率的有效性。

组间比较表明,通过个性化步态康复训练可以提高脑卒中偏瘫患者的训练效率。

武汉大学郭朝教授团队在康复机器人与临床康复等方面进行了长期深入的理论研究与临床实践。团队多年来一直从事外骨骼机器人、人工智能技术、康复医学等方面研究,在柔性驱动器仿生设计与控制、外骨骼机器人设计与控制、人体下肢步态相位检测、模仿学习与人机协作控制等方面取得了较好的研究成果。
山东大学齐鲁医院张志勉教授团队积极开展了长达近三十年的老年心脑血管疾病的筛查、诊疗和康复的临床与基础研究,先后获批国家级、省部级、厅局级课题十余项,科研成果获得山东省科技进步二等奖、山东省科技创新成果奖二等奖等厅级局以上奖励近十项,被评为全国健康管理示范基地,并获得山东省“巾帼文明岗”、“青年文明号”、“山东省城乡妇女岗位建功先进集体”等荣誉称号。
目前,在康复机器人领域,国际巨头已经在柔性可穿戴医疗器械的创新和产业化方面走在了世界的前沿,我国大部分生产康复机器人的企业都停留在框架训练型机器人阶段,在动力柔性化、数据智能化等多个核心技术方面无法突破。
迈步机器人公司一直专注康复机器人的研发,此次发表的两篇高水平论文代表着团队在机器人领域顶尖的技术水平,具有强大的研发能力和创新理念。迈步机器人基于柔性驱动器的机器人核心技术,研发了数款外骨骼机器人,结合人体工程学,为柔性康复机器人领域的建立与发展提供先进的技术储备,并培育和促进全国康复机器人产业的发展。
迈步机器人团队已在医疗康复机器人领域申请国内外专利近两百项,已授权一百余项。目前,主要认证及荣誉:2017、2018年获得清科 Venture 50(中国最具投资价值企业50强)称号,2018年获得深圳明日之星称号,2018年获得粤港澳大湾区人工智能百强企业称号,2020年获得最具投资价值医疗科技企业TOP10称号,2021年获得广东省柔性可穿戴康复机器人工程技术研究中心认定等。

迈步机器人还在加紧布局智能康复体系的建设,通过研发生产多种类型的外骨骼机器人,让机器人辅助的康复训练涵盖多个方面,并借助大数据与人工智能逐步建立与临床评价相对应的机器人评价体系,最终实现个性化、精准化、智能化康复训练,以应对我国加速到来的老龄化社会。
Comments are closed.